



Véier Axis Roboter Serie



Véier Axis Roboter Serie

Véierachs Roboter Serie JZJ100B-230 100KG

Véierachs Roboter Serie JZJ25B-180 25KG

Véierachs Roboter Serie JZJ15B-140 15KG
Kuerz Aféierung vum automateschen Handling Roboter:
1. De Luede- an Ausluede Roboter huet e grousst Belaaschtungsberäich vu verschiddene Kilogramm op e puer honnert Kilogramm;
2. D'Lafgeschwindegkeet ass séier a justierbar;
3. Flexibel Handlung, kann komplizéiert Handling a Luede an Ausluede vun Aufgaben ausféieren
4. Héich Zouverlässegkeet an einfach Ënnerhalt.
5. Et kann déi dreidimensional Raumbewegung vu schwéiere Objete fäerdeg maachen wéi z'ergräifen, transportéieren, ëmdréinen, Koppelen an esou weider. Et gëtt en idealen Instrument fir Ëmgank a Montage vu Materialen op an Off-Line a Montage vu Produktiounsdeeler. De Lued- an Ausluede Roboter kann d'Aarbechtsintensitéit reduzéieren a sécher Materialhandtering ubidden. Zur selwechter Zäit kann et och de speziellen Ëmfeld treffen, wéi déi geféierlech Plazen, wou de explosiounsbestännegen Atelierspersonal net erakënnt, a Systemlösungen ubitt.
6. Mat enger Vielfalt vun net-Standard Armaturen kann de Roboter verschidde Forme vum Werkstéck ergräifen, an de Bedreiwer kann d'Belaaschtung einfach erofhuelen a landen, réckelen, rotéieren, virschwenken a rullt. An d'Laascht ass séier a präzis an der Voreel Positioun plazéiert. Mat et kann eng Persoun einfach d'Saachen operéieren déi nëmmen e puer Leit kënne réckelen.
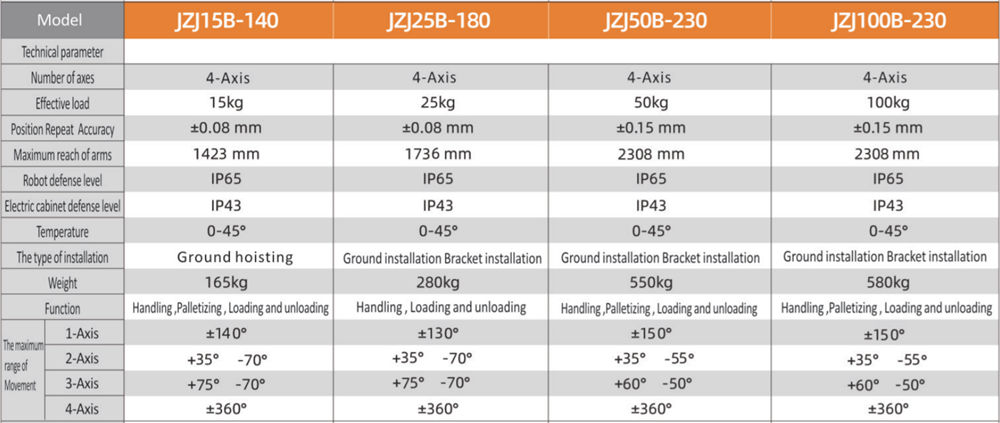
Véier Axis Roboter Serie Technesch Parameter
Wat sinn d'Haaptvirdeeler vun Transportroboter?
1. De Palletiséierungs- an Handlingroboter besetzt manner Plaz, wat fir de Layout vun der Produktiounslinn am Clientatelier ass, a kann e méi grousst Lagerberäich reservéieren. An de Roboter kann effektiv an engem enke Raum plazéiert ginn.
2. De Palletiséierung an den Transportroboter huet einfach Struktur a wéineg Deeler. Dofir hunn Ersatzteiler niddereg Ausfallquote, zouverléisseg Leeschtung, einfach Ënnerhalt a wéineg Ersatzdeeler.
3. De Stroumverbrauch vu Palletiséierung an Handling Roboter ass niddereg. Ënner normalen Ëmstänn ass d'Kraaft vum Palletiséierungs- a Vermëttlungsroboter ongeféier 26KW, wärend d'Kraaft vum Palletiséierroboter ongeféier 5kW ass. Reduzéieren d'Betribskäschte vun de Clienten immens.
4. De Palletiséierungs- an Handlingroboter huet staark Uwendbarkeet. Wann d'Gréisst, d'Volumen, d'Form vum Clienteprodukt an d'Form an d'Gréisst vun der Palette änneren, gëtt déi normal Produktioun vum Client net vun enger klenger Ännerung um Touchscreen beaflosst. D'Rekonstruktioun vum Palletiséieren an Transport vu Roboter ass ganz lästeg, och net ka realiséiert ginn.
5. All Kontrollen vum Palletiséierungs- an Handlingroboter kënnen um Bildschierm vum Kontrollkabinett bedriwwe ginn, an d'Operatioun ass ganz einfach.
6. Soulaang de Startpunkt an de Placementspunkt bestëmmt sinn, ass d'Léiermethod einfach ze verstoen.